Portable Underwater Remotely Operated Vehicle Systems by DESISTEK
Desistek Inc. is the first and only manufacturer company of portable underwater remotely operated vehicle (ROV) systems in Turkey. It was founded in 2011 and based in KOSGEB Technology Development Center, Middle East Technical University, Ankara. Desistek Inc. has been supported by both Tekno Girişim Capital Support Program of Ministry of Science, Industry and Technology, and Small and Medium Enterprises Development Organization.
Founders of Desistek Inc. completed ULİSAR (National Autonomous Underwater Vehicle) Project between 2006-2010 which was financed by the Scientific and Technological Research Council of Turkey. ULİSAR is the first autonomous underwater vehicle designed and produced in Turkey.
Offshore oil and gas industry, military/security market, and scientific research can be classified as the main application areas of ROVs. According to the World ROV Market Forecast Report of Douglas-Westwood, the market is expected to grow to $1.5 billion by 2015. Some of the missions that can be carried out with ROVs are listed as follows:
Underwater search and survey operations
Monitoring of oil platform moorings
Inspection of ship hull, pipes, welds, cables, etc.
Underwater crime scene investigation
Execution of underwater works such as recovery and repair
Environmental monitoring and data sampling
Monitoring of harbors’ environment and structures
Mapping sewage grids or underwater channels
Desistek Inc. designs and produces portable ROVs which are capable of inspecting and monitoring underwater, gathering data, collecting samples, performing underwater search and identification even in zero visibility. The company designs variety of ROVs with adequate depth capability, extended range of view, automatic control functions and proper structure to withstand harsh environments. The configuration of the ROVs can also be customized according to the purpose of use and customer needs.
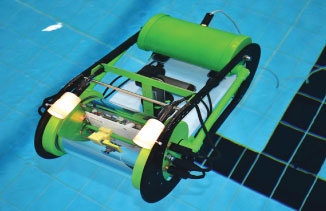
DST-R-300-4 is a personal MiniROV system designed and produced by Desistek Inc. for professional and amateur use. The system consists of a portable ROV, tether cable and control console. The ROV weighs nearly 20 kg in air and has a depth rating of 100 m. The ROV is equipped with LED lighting, cameras and thrusters. LEDs provide underwater illumination. High resolution color video cameras and black and white video cameras having 180 degrees of camera tilt provide underwater images. The ROV can also be equipped with a sonar system to provide acoustic images of underwater objects in zero visibility. Thrusters enable the ROV to move in all directions with a forward speed up to 2.5 knots. The tether cable is a physical connection between the ROV and the control console which allows them to communicate. It also provides power to ROV. The ROV is operated via the control console. It includes a computer, display screen and ROV controller unit (joystick) kept in a rugged and waterproof case.
Academic studies conducted by the employees form the basis of the technology behind the company’s products. Publications report optimal guidance/autopilot algorithms for the 3-dimensional movement of DST-R-300-4 in underwater environment so that the ROV can realize its 3-dimensional movement to a desired position and orientation with a desired velocity by consuming minimum amount of energy [1, 2]. In another study [3], the mathematical model of an unmanned underwater vehicle is obtained for autopilot design. This system is linearized for designing surge speed and yaw angle controllers. The optimal control problem is structured in order to reach desired position and angle with desired speed. Desistek Inc. also works on optical and sonar image processing to enhance visual feedback especially in low visibility underwater conditions [4].
References;
S. K. Kartal, F. Y. Cevher, M. K. Leblebicioğlu, "3D Optimal Autopilot Design for an Unmanned Underwater Vehicle DST-R-300-4", National Automatic Control Meeting, 2012.
F. Y. Cevher, S. K. Kartal, M. K. Leblebicioğlu, "Optimal Guidance-Autopilot Design for an Unmanned Underwater Vehicle DST-R-300-4", National Automatic Control Meeting, 2012.
F. Y. Cevher, S. K. Kartal, M. K. Leblebicioğlu, "Optimal Departure Autopilot Design for Unmanned Underwater Vehicle", SAVTEK, 2012.
H. Sac, M.K. Leblebicioğlu, "Simulation of Sonar Images", SAVTEK, 2012.





